Quickstart Guide
Welcome to DirectTrajOpt.jl! This guide will get you up and running in minutes.
What is DirectTrajOpt?
DirectTrajOpt.jl solves trajectory optimization problems - finding optimal control sequences that drive a dynamical system from an initial state to a goal state while minimizing a cost function.
Installation
First, install the package:
using Pkg
Pkg.add("DirectTrajOpt")You'll also need NamedTrajectories.jl for defining trajectories:
using DirectTrajOpt
using NamedTrajectories
using LinearAlgebra
using CairoMakieA Minimal Example
Let's solve a simple problem: drive a 2D system from [0, 0] to [1, 0] with minimal control effort.
Step 1: Define the Trajectory
A trajectory contains your states, controls, and time information:
N = 50 # number of time steps
traj = NamedTrajectory(
(
x = randn(2, N), # 2D state
u = randn(1, N), # 1D control
Δt = fill(0.1, N), # time step
);
timestep = :Δt,
controls = :u,
initial = (x = [0.0, 0.0],),
final = (x = [1.0, 0.0],),
bounds = (Δt = (0.05, 0.2), u = 1.0),
)N = 50, (x = 1:2, u = 3:3, → Δt = 4:4)Step 2: Define the Dynamics
Specify how your system evolves. For bilinear dynamics ẋ = (G₀ + u₁G₁) x:
G_drift = [-0.1 1.0; -1.0 -0.1] # drift term
G_drives = [[0.0 1.0; 1.0 0.0]] # control term
G = u -> G_drift + sum(u .* G_drives)
integrator = BilinearIntegrator(G, :x, :u, traj)BilinearIntegrator: :x = exp(Δt G(:u)) :x (dim = 2)Step 3: Define the Objective
What do we want to minimize? Let's penalize control effort:
obj = QuadraticRegularizer(:u, traj, 1.0)QuadraticRegularizer on :u (R = [1.0], all)Step 4: Create and Solve
Combine everything into a problem and solve:
prob = DirectTrajOptProblem(traj, obj, integrator)DirectTrajOptProblem
Trajectory
Timesteps: 50
Duration: 4.9
Knot dim: 4
Variables: x (2), u (1), Δt (1)
Controls: u, Δt
Objective: QuadraticRegularizer on :u (R = [1.0], all)
Dynamics (1 integrators)
BilinearIntegrator: :x = exp(Δt G(:u)) :x (dim = 2)
Constraints (4 total: 2 equality, 2 bounds)
EqualityConstraint: "initial value of x"
EqualityConstraint: "final value of x"
BoundsConstraint: "bounds on Δt"
BoundsConstraint: "bounds on u"The problem summary shows the trajectory, objective, dynamics, and constraints:
probDirectTrajOptProblem
Trajectory
Timesteps: 50
Duration: 4.9
Knot dim: 4
Variables: x (2), u (1), Δt (1)
Controls: u, Δt
Objective: QuadraticRegularizer on :u (R = [1.0], all)
Dynamics (1 integrators)
BilinearIntegrator: :x = exp(Δt G(:u)) :x (dim = 2)
Constraints (4 total: 2 equality, 2 bounds)
EqualityConstraint: "initial value of x"
EqualityConstraint: "final value of x"
BoundsConstraint: "bounds on Δt"
BoundsConstraint: "bounds on u"solve!(prob; max_iter = 100, verbose = false)This is Ipopt version 3.14.19, running with linear solver MUMPS 5.8.2.
Number of nonzeros in equality constraint Jacobian...: 776
Number of nonzeros in inequality constraint Jacobian.: 0
Number of nonzeros in Lagrangian Hessian.............: 1254
Total number of variables............................: 196
variables with only lower bounds: 0
variables with lower and upper bounds: 100
variables with only upper bounds: 0
Total number of equality constraints.................: 98
Total number of inequality constraints...............: 0
inequality constraints with only lower bounds: 0
inequality constraints with lower and upper bounds: 0
inequality constraints with only upper bounds: 0
iter objective inf_pr inf_du lg(mu) ||d|| lg(rg) alpha_du alpha_pr ls
0 1.0852484e-01 4.32e+00 2.67e+00 0.0 0.00e+00 - 0.00e+00 0.00e+00 0
1 1.1832598e-01 3.70e+00 2.28e+00 -0.6 6.59e+00 - 1.04e-01 1.47e-01f 1
2 1.2093707e-01 7.88e-01 1.16e+00 -1.2 2.63e+00 - 3.71e-01 8.06e-01h 1
3 1.3107119e-01 6.63e-01 1.99e+00 -2.1 8.71e-01 - 3.91e-01 1.59e-01h 1
4 1.5045193e-01 5.40e-01 1.83e+00 -2.6 1.56e+00 - 6.10e-02 1.85e-01h 1
5 1.7184791e-01 4.59e-01 1.41e+00 -2.8 9.08e-01 - 2.68e-01 1.51e-01h 1
6 1.9708489e-01 3.40e-01 1.33e+00 -2.7 2.44e+00 - 1.64e-01 2.60e-01h 1
7 1.9692291e-01 3.25e-01 3.99e+00 -0.7 3.05e+00 0.0 2.64e-01 4.19e-02f 1
8 2.0855402e-01 2.86e-01 4.76e+00 -1.6 1.33e+00 - 2.62e-01 1.20e-01h 1
9 2.0694488e-01 2.86e-01 1.90e+01 0.5 5.06e+01 -0.5 9.62e-02 2.72e-03f 1
iter objective inf_pr inf_du lg(mu) ||d|| lg(rg) alpha_du alpha_pr ls
10 1.9866907e-01 2.60e-01 1.84e+01 -0.0 5.62e+00 - 2.28e-01 8.98e-02f 1
11 2.4356563e-01 1.36e-01 1.65e+01 -0.3 1.69e+00 - 6.35e-01 4.77e-01h 1
Number of Iterations....: 12
Number of objective function evaluations = 13
Number of objective gradient evaluations = 13
Number of equality constraint evaluations = 13
Number of inequality constraint evaluations = 0
Number of equality constraint Jacobian evaluations = 12
Number of inequality constraint Jacobian evaluations = 0
Number of Lagrangian Hessian evaluations = 12
Total seconds in IPOPT = 6.443
EXIT: Invalid number in NLP function or derivative detected.Step 5: Access the Solution
Let's look at the results.
plot(prob.trajectory)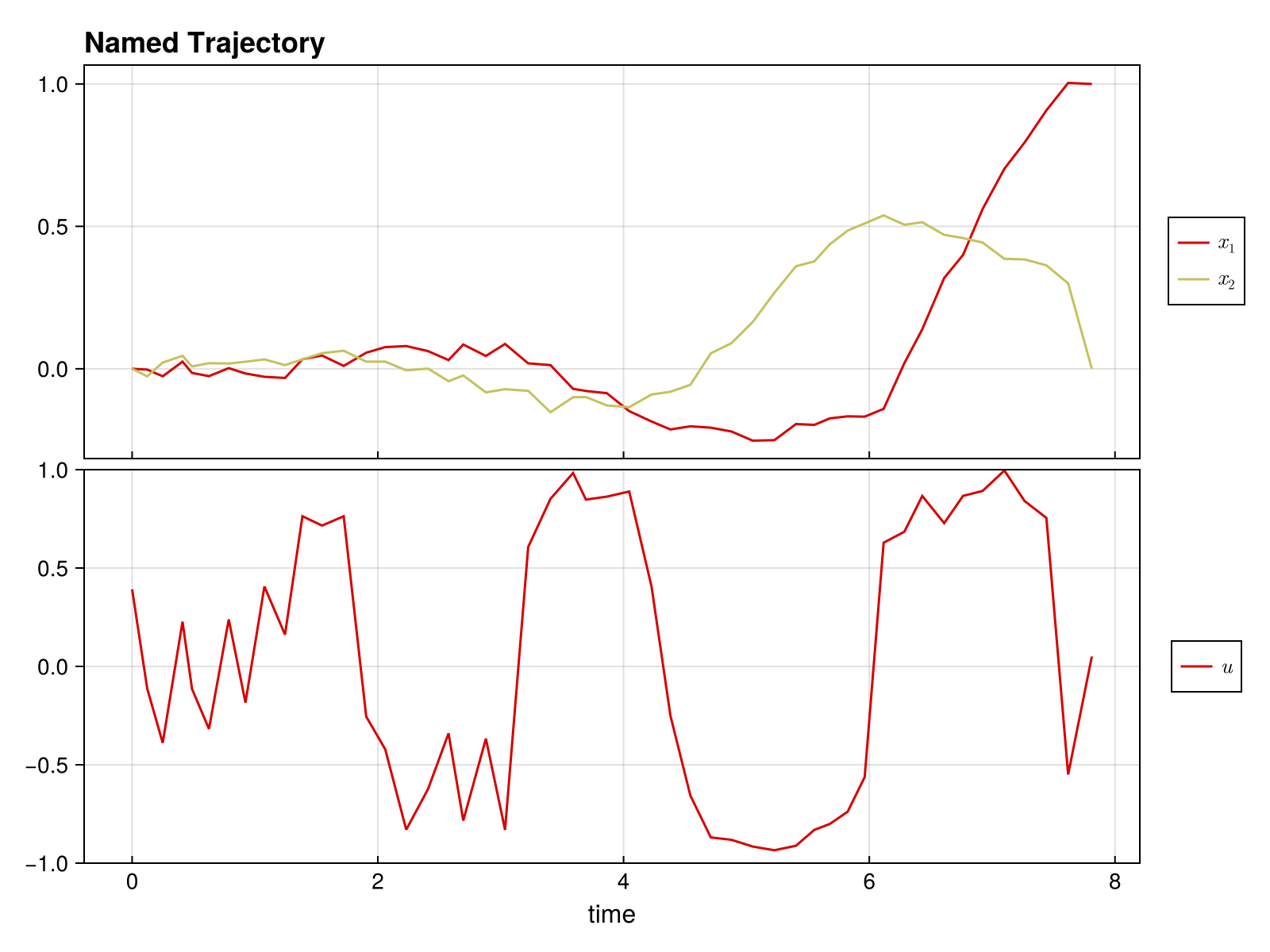
The optimized trajectory is stored in prob.trajectory:
println("Final state: ", prob.trajectory.x[:, end])
println("Control norm: ", norm(prob.trajectory.u))Final state: [1.0, 0.0]
Control norm: 4.777256022146048What You Can Do
- Multiple objectives: Combine regularization, minimum time, terminal costs
- Flexible dynamics: Linear, bilinear, time-dependent systems
- Add constraints: Bounds, path constraints, custom nonlinear constraints
- Smooth controls: Penalize derivatives for smooth, implementable controls
- Free time: Optimize trajectory duration
This page was generated using Literate.jl.