Complete Example: Time-Optimal Bilinear Control
This example demonstrates solving a time-optimal trajectory optimization problem with:
- Multiple control inputs with bounds
- Free time steps (variable Δt)
- Combined objective (control effort + minimum time)
using DirectTrajOpt
using NamedTrajectories
using LinearAlgebra
using CairoMakieProblem Setup
System: 3D oscillator with 2 control inputs
\[\dot{x} = (G_0 + u_1 G_1 + u_2 G_2) x\]
Goal: Drive from [1, 0, 0] to [0, 0, 1] minimizing ∫ ||u||² dt + w·T
Constraints:-1 ≤ u ≤ 1, 0.05 ≤ Δt ≤ 0.3
Define System Dynamics
G_drift = [
0.0 1.0 0.0;
-1.0 0.0 0.0;
0.0 0.0 -0.1
]
G_drives = [
[
1.0 0.0 0.0;
0.0 0.0 0.0;
0.0 0.0 0.0
],
[
0.0 0.0 0.0;
0.0 0.0 1.0;
0.0 1.0 0.0
],
]
G = u -> G_drift + sum(u .* G_drives)#2 (generic function with 1 method)Create Trajectory
N = 50
x_init = [1.0, 0.0, 0.0]
x_goal = [0.0, 0.0, 1.0]
x_guess = hcat([x_init + (x_goal - x_init) * (k/(N-1)) for k = 0:(N-1)]...)
traj = NamedTrajectory(
(x = x_guess, u = 0.1 * randn(2, N), Δt = fill(0.15, N));
timestep = :Δt,
controls = (:u, :Δt),
initial = (x = x_init,),
final = (x = x_goal,),
bounds = (u = 1.0, Δt = (0.05, 0.3)),
)N = 50, (x = 1:3, u = 4:5, → Δt = 6:6)Build and Solve Problem
integrator = BilinearIntegrator(G, :x, :u, traj)
obj = (QuadraticRegularizer(:u, traj, 1.0) + 0.5 * MinimumTimeObjective(traj, 1.0))
prob = DirectTrajOptProblem(traj, obj, integrator)
probDirectTrajOptProblem
Trajectory
Timesteps: 50
Duration: 7.35
Knot dim: 6
Variables: x (3), u (2), Δt (1)
Controls: u, Δt
Objective (2 terms)
1.0 * QuadraticRegularizer on :u (R = [1.0, 1.0], all)
0.5 * MinimumTimeObjective (D = 1.0)
Dynamics (1 integrators)
BilinearIntegrator: :x = exp(Δt G(:u)) :x (dim = 3)
Constraints (4 total: 2 equality, 2 bounds)
EqualityConstraint: "initial value of x"
EqualityConstraint: "final value of x"
BoundsConstraint: "bounds on u"
BoundsConstraint: "bounds on Δt"solve!(prob; max_iter = 50) initializing optimizer...
building evaluator: 1 integrators, 0 nonlinear constraints
dynamics constraints: 147, nonlinear constraints: 0
integrator 1 jacobian structure: 0.359s
jacobian structure: 1764 nonzeros (0.381s)
integrator 1 hessian structure: 0.019s
computing objective hessian structure (CompositeObjective)...
sub-objective 1 (QuadraticRegularizer): 0.362s
sub-objective 2 (MinimumTimeObjective): 0.007s
objective hessian structure: 0.425s
hessian structure: 2814 nonzeros (0.444s)
linear index maps built (0.004s)
evaluator ready (total: 0.969s)
evaluator created (1.67s)
NL constraint bounds extracted (0.026s)
NLP block data built (0.0s)
Ipopt optimizer configured (0.009s)
variables set (0.346s)
applying constraint: initial value of x
applying constraint: final value of x
applying constraint: bounds on u
applying constraint: bounds on Δt
linear constraints added: 4 (0.597s)
optimizer initialization complete (total: 2.68s)
******************************************************************************
This program contains Ipopt, a library for large-scale nonlinear optimization.
Ipopt is released as open source code under the Eclipse Public License (EPL).
For more information visit https://github.com/coin-or/Ipopt
******************************************************************************
This is Ipopt version 3.14.19, running with linear solver MUMPS 5.8.2.
Number of nonzeros in equality constraint Jacobian...: 1746
Number of nonzeros in inequality constraint Jacobian.: 0
Number of nonzeros in Lagrangian Hessian.............: 2748
Total number of variables............................: 294
variables with only lower bounds: 0
variables with lower and upper bounds: 150
variables with only upper bounds: 0
Total number of equality constraints.................: 147
Total number of inequality constraints...............: 0
inequality constraints with only lower bounds: 0
inequality constraints with lower and upper bounds: 0
inequality constraints with only upper bounds: 0
iter objective inf_pr inf_du lg(mu) ||d|| lg(rg) alpha_du alpha_pr ls
0 3.6866113e+00 1.47e-01 1.06e-01 0.0 0.00e+00 - 0.00e+00 0.00e+00 0
1 2.7221034e+00 1.30e-01 5.83e-01 -4.0 9.20e-01 - 1.47e-01 1.15e-01f 1
2 2.1393487e+00 1.20e-01 1.23e+01 -0.5 2.86e+00 - 4.27e-01 7.50e-02h 1
3 2.1368666e+00 1.15e-01 2.38e+01 0.3 7.70e+00 0.0 2.83e-01 5.33e-02f 1
4 2.3018848e+00 1.17e-01 4.21e+01 0.8 1.54e+01 - 1.67e-01 2.76e-02f 1
5 2.4828336e+00 1.13e-01 1.14e+02 0.9 1.52e+01 - 3.65e-01 3.68e-02f 1
6 2.6288592e+00 7.53e-02 3.03e+02 0.6 1.60e+00 - 9.52e-01 3.72e-01h 1
7 2.3863779e+00 6.61e-02 3.41e+03 1.3 1.64e+00 2.2 8.51e-01 1.27e-01h 1
8r 2.3863779e+00 6.61e-02 9.99e+02 -1.2 0.00e+00 1.8 0.00e+00 2.69e-07R 12
9r 2.3902088e+00 7.87e-02 9.82e+02 1.7 8.44e+01 - 3.10e-01 2.30e-03f 1
iter objective inf_pr inf_du lg(mu) ||d|| lg(rg) alpha_du alpha_pr ls
10r 2.4160589e+00 7.37e-02 8.17e+02 1.1 2.13e+00 - 3.39e-01 7.04e-02f 1
11r 2.4708980e+00 4.67e-02 7.95e+02 1.1 7.77e-01 - 9.62e-01 1.63e-01f 1
12r 3.0580182e+00 8.40e-02 1.49e+02 1.1 1.55e+00 - 1.00e+00 7.10e-01f 1
13r 2.8532884e+00 5.36e-02 9.72e+01 0.4 2.01e-01 2.0 6.89e-01 1.00e+00f 1
14 3.1230607e+00 1.83e-02 6.03e+00 -1.1 1.17e+00 - 7.13e-01 7.98e-01H 1
15 3.1062004e+00 3.75e-03 1.82e+00 -1.3 1.03e-01 1.3 9.96e-01 9.21e-01f 1
16 3.1201915e+00 3.83e-05 6.01e-01 -2.3 1.18e-02 1.7 1.00e+00 1.00e+00h 1
17 3.1097735e+00 1.53e-05 8.59e-02 -3.9 5.25e-03 1.2 1.00e+00 1.00e+00h 1
18 3.0792583e+00 1.36e-04 8.85e-02 -4.0 1.58e-02 0.7 1.00e+00 1.00e+00f 1
19 3.0460727e+00 2.04e-04 8.73e-02 -4.0 4.60e-02 0.3 1.00e+00 5.05e-01f 1
iter objective inf_pr inf_du lg(mu) ||d|| lg(rg) alpha_du alpha_pr ls
20 3.0000570e+00 6.36e-04 8.86e-02 -4.0 1.47e-01 -0.2 1.00e+00 3.21e-01f 1
21 2.9606755e+00 3.45e-04 7.40e-02 -4.0 4.17e-02 0.2 1.00e+00 7.92e-01h 1
22 2.9100483e+00 6.57e-04 6.43e-02 -4.0 9.29e-02 -0.3 1.00e+00 4.39e-01f 1
23 2.8707608e+00 3.63e-04 5.80e-02 -4.0 3.91e-02 0.2 1.00e+00 1.00e+00h 1
24 2.8389592e+00 4.09e-04 5.26e-02 -4.0 8.83e-02 -0.3 1.00e+00 3.30e-01h 1
25 2.7403930e+00 1.28e-03 5.45e-02 -4.0 1.82e-01 -0.8 1.00e+00 4.82e-01f 1
26 2.6990850e+00 7.15e-04 3.35e-02 -3.7 7.16e-02 -0.4 1.00e+00 7.07e-01h 1
27 2.6632686e+00 6.14e-04 7.08e-02 -4.0 1.87e-01 -0.8 1.00e+00 2.72e-01h 1
28 2.6240485e+00 3.20e-04 2.90e-02 -4.0 7.42e-02 -0.4 1.00e+00 8.20e-01h 1
29 2.5664670e+00 7.62e-04 5.27e-02 -4.0 2.06e-01 -0.9 1.00e+00 5.20e-01h 1
iter objective inf_pr inf_du lg(mu) ||d|| lg(rg) alpha_du alpha_pr ls
30 2.5476597e+00 4.36e-04 2.72e-02 -4.0 7.68e-02 -0.5 1.00e+00 5.32e-01h 1
31 2.5135738e+00 5.42e-04 5.40e-02 -3.7 2.14e-01 -0.9 1.00e+00 4.16e-01h 1
32 2.4889240e+00 1.18e-03 1.38e-01 -3.0 5.11e-01 -1.4 9.67e-01 2.12e-01f 1
33 2.4701982e+00 8.91e-04 5.67e-02 -3.8 2.03e-01 -1.0 9.99e-01 3.01e-01h 1
34 2.4323555e+00 4.85e-03 7.70e-02 -3.2 4.44e-01 -1.5 1.00e+00 4.58e-01f 1
35 2.4010655e+00 4.46e-03 3.53e-02 -2.9 7.92e-01 -1.9 1.00e+00 4.71e-01h 1
36 2.3695181e+00 1.55e-02 3.33e-02 -3.0 8.14e-01 -2.4 9.48e-01 4.82e-01h 1
37 2.3040929e+00 2.64e-03 4.22e-03 -3.6 2.17e-01 -2.0 1.00e+00 1.00e+00h 1
38 2.2896708e+00 7.33e-03 4.96e-03 -3.9 3.73e-01 -2.5 9.87e-01 7.10e-01h 1
39 2.2827047e+00 1.90e-03 1.45e-03 -4.0 1.31e-01 -2.0 1.00e+00 1.00e+00h 1
iter objective inf_pr inf_du lg(mu) ||d|| lg(rg) alpha_du alpha_pr ls
40 2.2800069e+00 1.63e-02 1.23e-02 -4.0 3.68e-01 -2.5 6.84e-01 8.85e-01h 1
41 2.3002013e+00 1.05e-02 7.43e-03 -3.4 4.93e-01 -3.0 1.00e+00 1.00e+00f 1
42 2.2849927e+00 1.47e-02 6.07e-03 -3.5 5.89e-01 - 9.83e-01 1.00e+00H 1
43 2.2909631e+00 2.45e-02 1.29e-02 -3.5 6.12e-01 -2.6 9.58e-01 8.58e-01h 1
44 2.2927249e+00 7.09e-03 5.22e-03 -3.5 2.84e-01 - 8.65e-01 1.00e+00f 1
45 2.2903881e+00 2.42e-03 1.11e-03 -3.5 1.72e-01 -2.1 1.00e+00 1.00e+00h 1
46 2.2890615e+00 1.25e-02 8.75e-03 -4.0 3.06e+00 - 1.30e-01 1.08e-01h 1
47 2.2842244e+00 8.40e-04 4.16e-04 -3.6 7.82e-02 - 1.00e+00 1.00e+00h 1
48 2.2752887e+00 1.43e-03 8.15e-04 -4.0 8.48e-02 - 1.00e+00 1.00e+00h 1
49 2.2751414e+00 3.85e-05 4.38e-05 -4.0 2.37e-02 - 1.00e+00 1.00e+00h 1
iter objective inf_pr inf_du lg(mu) ||d|| lg(rg) alpha_du alpha_pr ls
50 2.2751282e+00 1.05e-07 5.11e-08 -4.0 9.90e-04 - 1.00e+00 1.00e+00h 1
Number of Iterations....: 50
(scaled) (unscaled)
Objective...............: 2.2751281942176518e+00 2.2751281942176518e+00
Dual infeasibility......: 5.1113402583700084e-08 5.1113402583700084e-08
Constraint violation....: 1.0494078961365005e-07 1.0494078961365005e-07
Variable bound violation: 0.0000000000000000e+00 0.0000000000000000e+00
Complementarity.........: 1.0000169815782573e-04 1.0000169815782573e-04
Overall NLP error.......: 1.0494078961365005e-07 1.0494078961365005e-07
Number of objective function evaluations = 66
Number of objective gradient evaluations = 47
Number of equality constraint evaluations = 66
Number of inequality constraint evaluations = 0
Number of equality constraint Jacobian evaluations = 52
Number of inequality constraint Jacobian evaluations = 0
Number of Lagrangian Hessian evaluations = 50
Total seconds in IPOPT = 12.351
EXIT: Maximum Number of Iterations Exceeded.Visualize Solution
plot(prob.trajectory) # See NamedTrajectories.jl documentation for plotting options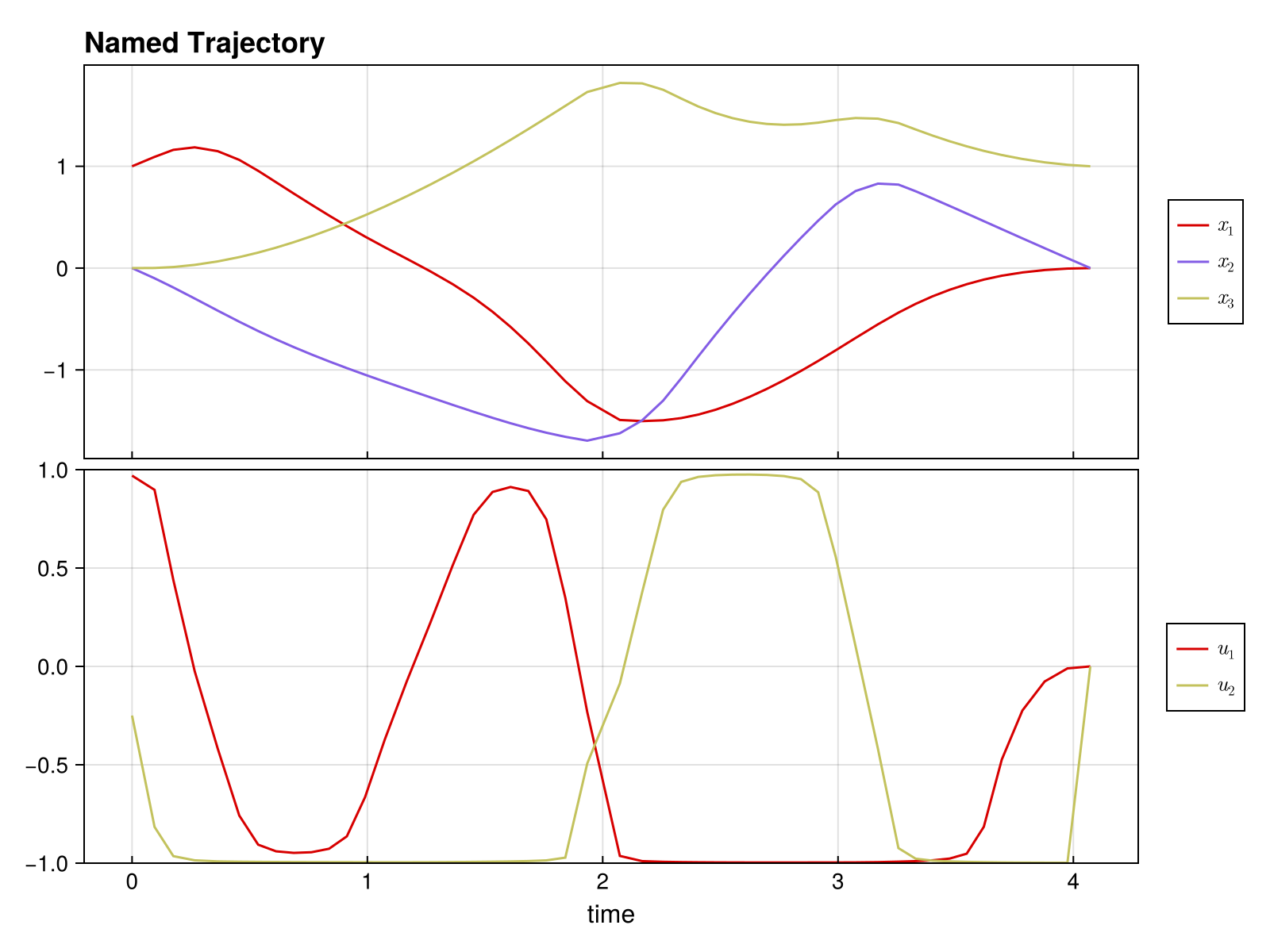
Analyze Solution
x_sol = prob.trajectory.x
u_sol = prob.trajectory.u
Δt_sol = prob.trajectory.Δt
println("Solution found!")
println(" Total time: $(sum(Δt_sol)) seconds")
println(" Δt range: [$(minimum(Δt_sol)), $(maximum(Δt_sol))]")
println(" Max |u₁|: $(maximum(abs.(u_sol[1,:])))")
println(" Max |u₂|: $(maximum(abs.(u_sol[2,:])))")
println(" Final error: $(norm(x_sol[:,end] - x_goal))")Solution found!
Total time: 4.247067644947218 seconds
Δt range: [0.07224452600159269, 0.175]
Max |u₁|: 0.9966535058647275
Max |u₂|: 0.9978914179084062
Final error: 0.0Key Insights
Free time optimization: Variable Δt allows the optimizer to adjust trajectory speed, with shorter steps where control is needed and longer steps in smooth regions.
Control bounds: With time weight 0.5, controls don't fully saturate. Increase the weight to push toward bang-bang control.
Combined objectives: The + operator makes it easy to balance multiple goals.
Exercises
1. Bang-bang control: Set time weight to 5.0 - do controls saturate the bounds?
2. Fixed time: Remove Δt from controls and compare total time.
3. Add waypoint: Require passing through [0.5, 0, 0.5] at the midpoint:
constraint = NonlinearKnotPointConstraint(
x -> x - [0.5, 0, 0.5], :x, traj;
times=[div(N,2)], equality=true
)
prob = DirectTrajOptProblem(traj, obj, integrator; constraints=[constraint])4. Different goal: Try reaching [0, 1, 0] or [0.5, 0.5, 0.5]
5. Tighter bounds: Use bounds=(u = 0.5, Δt = (0.05, 0.3)) - how does time change?
This page was generated using Literate.jl.